Nach den Sommerferien werde ich an der Grundschule meiner Tochter einen Nachmittagskurs „LEGO Roboter bauen“ anbieten. Als Generalprobe habe ich heute mit den Kindern aus der Klasse meiner Tochter dies in drei Gruppen zu je 8 Schülerinnen und Schüler ausprobiert; Dauer jeweils ca. 90 Minuten.
 Gebaut und programmiert haben wir das Model zum Thema „Zugkraft und Reibung“ aus dem LEGO Education WeDo 2.0 Set. Jeweils zwei Kinder haben mit einem Set und einem Tablet gearbeit. Es war das erste Mal, das ich mit Kindern zusammengearbeitet habe und es hat allen Beteiligten sehr viel Spaß gemacht – allein, Hochleistungssport ist wahrscheinlich weniger anstregend 😉 Meine detailliert ausgearbeitete Planung und Vorbereitung konnte ich jedoch schon nach 30 Sekunden über den Haufen werfen und musste mich ersteinmal in der Situation pausenlos quaselnder Kinder zurecht finden. Auch das war ein Grund für diese Generalprobe. Wichtige Lehre: Immer einen Plan B bereit haben – zum Glück hatte ich noch ein Ersatzset und einmal das fertig aufgebaute Model. Die Kids sind schon tottraurig, wenn ihr Roboter nicht funktioniert, weil sie das falsche Zahnrad eingesetzt haben.
Gebaut und programmiert haben wir das Model zum Thema „Zugkraft und Reibung“ aus dem LEGO Education WeDo 2.0 Set. Jeweils zwei Kinder haben mit einem Set und einem Tablet gearbeit. Es war das erste Mal, das ich mit Kindern zusammengearbeitet habe und es hat allen Beteiligten sehr viel Spaß gemacht – allein, Hochleistungssport ist wahrscheinlich weniger anstregend 😉 Meine detailliert ausgearbeitete Planung und Vorbereitung konnte ich jedoch schon nach 30 Sekunden über den Haufen werfen und musste mich ersteinmal in der Situation pausenlos quaselnder Kinder zurecht finden. Auch das war ein Grund für diese Generalprobe. Wichtige Lehre: Immer einen Plan B bereit haben – zum Glück hatte ich noch ein Ersatzset und einmal das fertig aufgebaute Model. Die Kids sind schon tottraurig, wenn ihr Roboter nicht funktioniert, weil sie das falsche Zahnrad eingesetzt haben.
Große Probleme haben auch die eingesetzten Tablets bereitet, die des öfteren die Bluetooth-Verbindung zum SmartHub verloren. Hier half nur ein deaktivieren von Bluetooth und anschließendes reaktivieren. Überhaupt hatten die Kinder hier große Schwierigkeiten, die Verbindung überhaupt aufzubauen, auch wenn ich den SmartHubs vorher folgende Namen gegeben hatte:
- Ada Lovelace
- Charles Babbagge
- Konrad Zuse
- Christiane Floyd
- Isaac Asimov
Die LEGO-Kästen und SmartHubs haben ebenfalls diesen Namen bekommen. Dies hat sich als sehr hilfreich erwiesen.
Die Tablets
Zurück zu den Tablets: Zum Einsatz kam fünf Mal das Acer Iconia Tab 10 (Modell 2016, A3-A40). Dieses Tablet würde ich derzeit aus folgenden Gründen für den Einsatz mit LEGO Education WeDo 2.0 nicht weiterempfehlen:
- Häufige Abbrüche der Bluetooth-Verbindung
- Keine Möglichkeit, Nutzerkonten einzurichten (trotz Android 6.0 Marshmallow)
- Akkulaufzeit zu kurz
- zu laute Lautsprecher
Letzteres ist deshalb negativ, weil die Kids ganz schnell die Videos in der zugehörigen App von LEGO gefunden haben.
Für das Tablet von Acer hatte ich mich entschieden, da es ein vielversprechendes Preis-/Leistungsverhältnis hatte (200 €; Tablets und LEGO Sets habe ich übrigens selbst gekauft und der Schule gespendet) und ein Markenname mir mehr Zuverlässigkeit versprach, als z. B. ein Tablet von Aldi. Tatsächlich hinterlässt mein Medion P10356 jedoch ein wesentlich stabilieren Eindruck, insbesondere bei der Bluetooth-Anbindung. Folgendes scheint mir hier ein guter Praxistest zu sein: Die LEGO App erlaubt es, bis zu drei SmartHubs mit einem Tablet zu verbinden. Für das Tablet von Medion absolut kein Problem, für das Tablet von Acer – Pustekuchen.
Was ich vorher hätte nachlesen können, aber bei Android 6.0 Marshmallow nicht erwartet hatte, war die fehlende Möglichkeit, auf den Tablets lokale Benutzerkonten einzurichten. Dadurch wollte ich verhindern, dass die Kids die Einstellungen verändern oder andere Apps starten. Tatsächlich haben die Kinder das gar nicht erst versucht. Und wenn doch, dann hätte die von mir auf allen Tablets installierte App „AppLock“ das hoffentlich verhindert.
Vor dem Einsatz hatte ich alle Tablets voll aufgeladen und ausgeschaltet. Ein Tablet hat die 3x 90 Minuten nicht überstanden. Auch hier hat sich der Plan B – ein komplettes LEGO Set und Tablet als Ersatz – als Rettung in der Not erwiesen.
Die LEGO App
Meine Befürchtungen, dass die Kinder bei der Bedienung des Tablets und der WeDo 2.0 App von LEGO (Full Version) Schwierigkeiten bekommen würden – ich hielt die Pfeil-Schaltflächen für zu klein – hat sich im großen und ganzen als unbegründet erwiesen. Tablets lassen sich mit dem Finger wirklich kinderleicht bedienen. Doch im Detail.
Das erste, was negativ ist, ist das Einführungsvideo auf der Startseite. Es nimmt den halben Bildschirm ein und die Kids haben natürlich sofort drauf geklickt – tschüss Aufmerksamkeit, denn alle Videos sprechen die Kinder an und bringt sie zum Lachen.
Das Blättern durch die Baueinleitung gestaltet sich problemlos und in den ca. 30 Minuten, die die Kinder für den Aufbau des Modells benötigt haben, herschte angenehme Ruhe, ja manchmal sogar richtige Stille. Wer baut und Teile raussucht, da haben sich die Kinder prima selbst organisiert; eine Hilfestellung in Baumeister und Materialmanager, wie es die Lehrerhandreichungen von LEGO empfehlen, waren gar nicht notwendig. Jungen-Teams waren deutlich schneller fertig als die Mädchen oder gemischte Teams (hier sind dann die vielen Videos dann aber doch wieder ein guter Lückenfüller; andere bauen aus den verbleibenden LEGO Bausteinen teils erstaunlich tolle Konstrukte (Hund, Tech-Mech)).
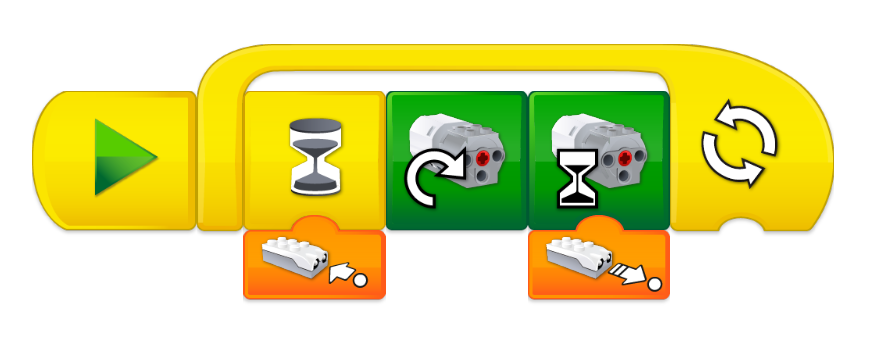
Komplizieter war dagegen das Programmieren, vor allem, weil die Kinder was anderes als das vorgegebene Programm programmieren wollten. Die eingblendete Tablettastatur hat dann auch die größten Schwierigkeiten verursacht. Der 3-2-1-Countdown hat sich dabei als echter Zeitfresser und Fruststifter erwiesen.
Die größte Herausforderung war, wie schon oben erwähnt, das Herstellen der Bluetooth-Verbindung. Tipp: Die Verbindung erst aufbauen lassen, wenn das Programm fertig ist (zum Ausprobieren, was einzelne Programmblöcke tun, dafür ist in 90 Minuten keine Zeit).
Experimentieren
Eigentlich sollten die Kinder noch ein wenig experimentieren und herausfinden, wie der Roboter mehr Reifen ziehen kann oder sich auf unterschiedlichen Untegründen verhält (ich hatte eine Holzplatte mit, auf der Teile mit Filz und mit einer dünnen Plexiglasscheibe beklemmt waren), aber das sich der Roboter bewegt, hat schon viel zur Begeisterung beigetragen. Die ständigen Abbrüche der Bluetooth-Verbindungen sind jedoch als Frustfaktor nicht zu unterschätzen – oder ein Roboter, der vom Tisch fällt und dann in seine Einzelteile zerfällt…
Erstaunlicherweise bewegen sich einige Modell schneller als andere. Ob da an leicht anderen Aufbauten lag, konnte ich in der Kürze der Zeit nicht herausfinden.
Abbau
Da ich dreimal hinter einander den Exkurs angeboten hatte, musste die Modelle auch wieder auseinander gebaut werden. Dies Durchzusetzen ist fast ein Ding der Unmöglichkeit („Kann ich den nicht mit nach Hause nehmen?“ oder „Robbi hat mir doch gar nichts getan.“) klappt dann aber doch, wobei ich den Kinder die Tablets aus der Hand nehmen musste.
Leider landen die Bauteile nur selten in den Fächern, in die sie hingehören. Hier ist ausreichend Zeit einzuplanen und die Sets nachzusortieren oder fehlende Teile zu identifizieren (meistens haben sie sich dann in einem anderen Kasten wiedergefunden).
Ein Bauteil scheint jetzt aber dennoch dauerhaft verlustig zu sein. Hier werde ich das Ersatzteileseit von LEGO mal ordern und prüfen, ob LEGO da den richtigen Riecher hat, welche Teile am häufigsten verloren gehen.
Auch hier gilt Plan-B: Ein Set als schnell verfügbares Ersatzteillager ist unabdingbar.
Fazit
Kinder und Veranstalter hatten unglaublich viel Spaß und ich freue mich schon auf den Kurs nach den Sommerferien.
Vielen Dank, liebe Kinder der 2c, dass ihr so toll mitgemacht habt!
P.S.:
Dieser Bericht wird noch durch Bilder und Videos ergänzt.