
Basierend auf Yoshihito Isogawa LEGO WeDo Wall Tracer habe ich einen „Line Follower“ entwickelt, also einen Roboter, der einer Linie folgt. Das klingt zunächst einmal erst unmöglich, denn schließlich gibt es im LEGO WeDo 2.0 Set nur einen Motor und nur einen Neigungs- und Abstandssensor. Letztere ist jedoch kein Hochpräzisionssensor, sondern der Abstand wird per Infrarot gemessen. Da reicht dann ein starker Kontrast aus, um dem Sensor eine Abstandsänderung vorzugaukeln.
Das Ergebniss habe ich in einem Video festgehalten:
Und hier noch das Programm dazu: Standardmäßig fährt der Roboter nach links-vorwärts, also solange der „Abstand“ > 0 ist, der Roboter/Sensor also über der schwarzen Linie ist. Ändert sich der Abstand auf 0, fährt der Roboter rechts/vorwärts bis er wieder über der schwarzen Linie ist.
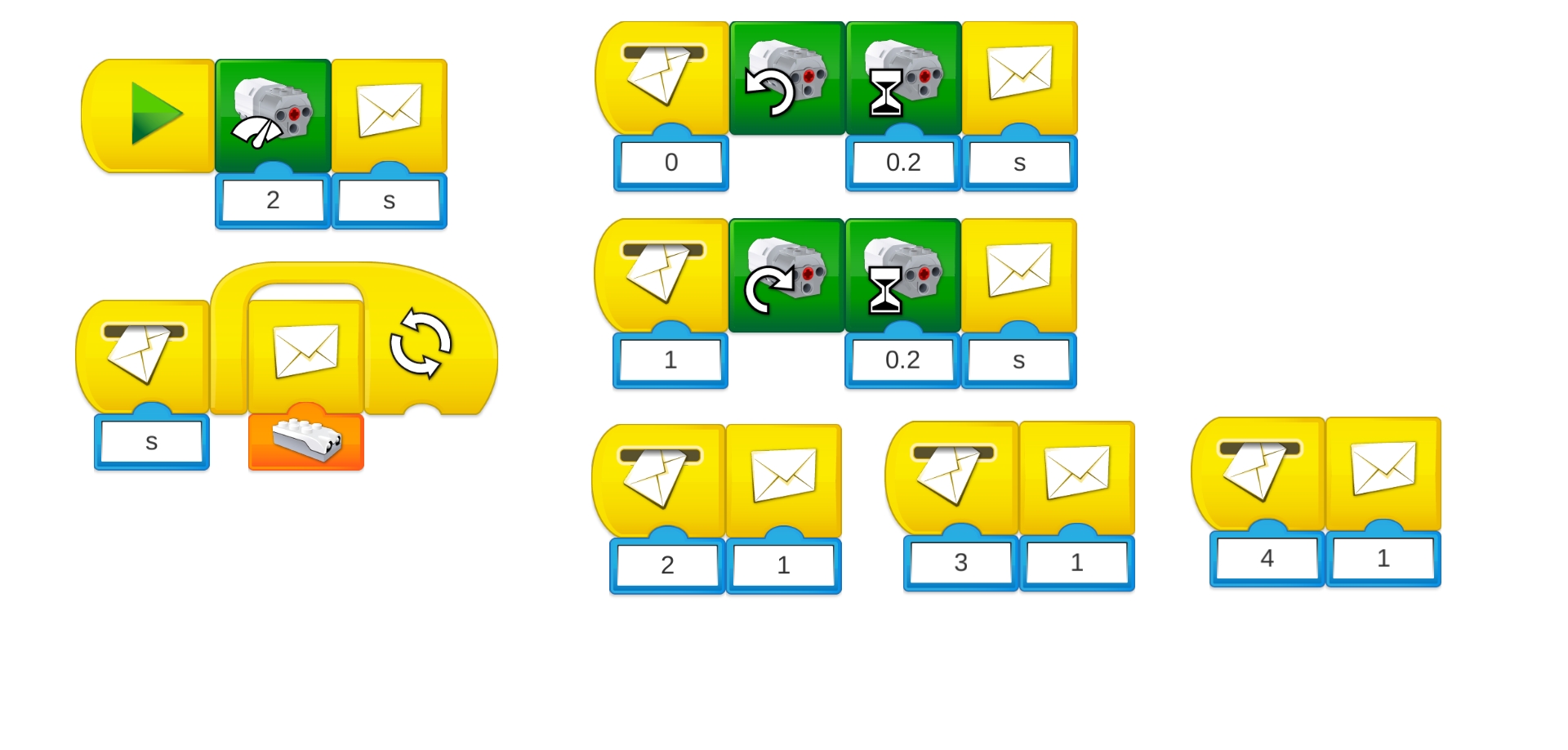
Programm „Line Follower“
Wie zu sehen, schickt das Programm eigentlich die ganze Zeit Nachrichten mit dem aktuellen Messwert des Sensors durch die Gegend…